Las pinzas robóticas se encuentran en pleno desarrollo buscando opciones de sujeción distintas. Es el caso de la pinza acústica de la investigación Schuck, la cual está siendo desarrollada en la Universidad de ETH Zurich. Mediante ultrasonidos, permitirá agarrar cosas sin tener que tocarlos.
El joven de 31 años Marcel Schuck es un investigador de la Universidad de ETH Zurich. En estos momentos se encuentra investigando con el capital de ETH Pioneer Fellowship la realización de una pinza robótica mediante tecnología de ondas sonoras. La singularidad de este Gripper para robot es que permite agarrar elementos minúsculos y quebradizos sin la necesidad de manejarlos.
El objetivo es poder dar al sector de la Automatización Industrial nuevas oportunidades de manejo de objetos. Para ello se hallan examinando los ámbitos potenciales de utilización en la industria.
Se piensa que será de gran provecho para tocar elementos especialmente de gran valor que sean frágiles. Ciertas de las utilizaciones potenciales serían en la industria de la relojería o en la fabricación de microchips.
Ahora, para no estropear los elementos, se utilizan pinzas suaves corrientes parecidas al caucho. Son ideales para tratar con elementos quebradizas, pero tienen ciertas limitaciones de precisión en el posicionamiento además de ser contaminantes.
Schuck No-Touch Robotics es como se llama el proyecto y aplica tecnología espacial. Primordialmente se basa en un efecto que se viene empleando desde hace más de 80 años. Son ondas de ultrasonido que causan un campo de presión totalmente inapreciable para los humanos.
Específicamente hay unos puntos de presión que se generan debido a que las ondas acústicas se sobreponen entre sí. Este movimiento genera que un objeto pueda permanecer levitando en el aire.
Uno de los beneficios que ofrece el programa de sujeción por ultrasonidos es que puede sostener objetos con diferentes geometrías sin que tengamos que cambiar las pinzas de agarre.
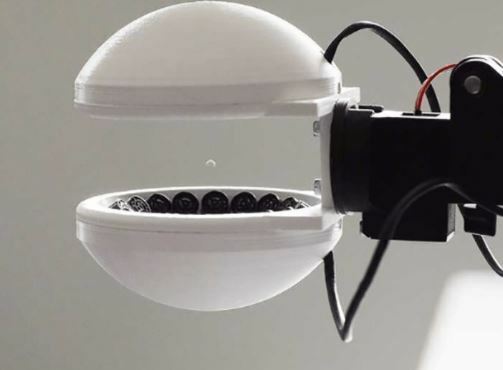
Marcel Schuck cree poder controlar la pinza electrónicamente por ultrasonido mediante un software que dirija a su vez el brazo robótico. Para lograrlo, ha puesto numerosos altavoces de reducidas medidas en las 2 pinzas con forma de esfera personalizadas en una impresora 3D.